CAPL programming, Basics of CAN protocol
What you will learn
CAPL programming using BUSMASTER, CAPL scripting
CAN Test Automation
Basics of CAN protocol
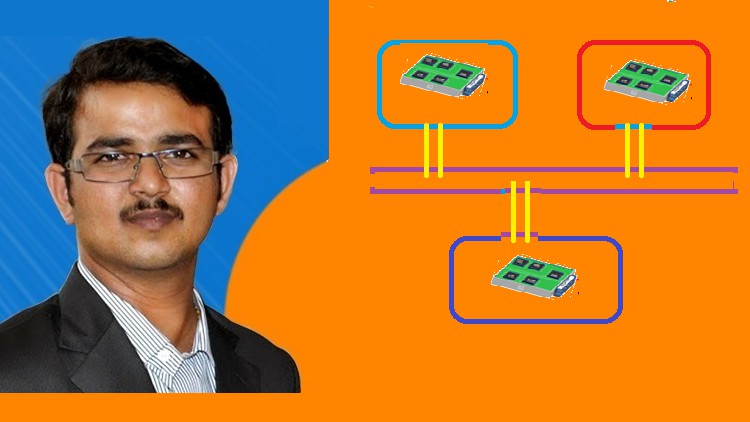
CAN Node and Network Simulation
I am not Teaching CAPL using vector tool
Description
I am not Teaching CAPL using vector tool
CAN node simulation,
CAN network simulation,
BUSMASTER basics
CAN Test Automation.
- Controller Area Network(CAN) & LIN protocols overview: Introduction to the Controller Area Network(CAN) & LIN protocol, Overview of Reasons for the development of Controller Area Network(CAN) & LIN, Comparison of Controller Area Network(CAN) with other serial communication protocols, Controller Area Network(CAN) vehicle network Architecture, Features of Controller Area Network(CAN) protocol, Frame formats of Controller Area Network(CAN)
- DATA frame, Remote frame, error frame and Overload frame of Controller Area Network(CAN)
- Arbitration process in Controller Area Network(CAN) communication protocol to resolve the BUS conflict
- NRZ format of Controller Area Network(CAN) protocol
- Bit-stuffing to avoid the problem cause due to NRZ format
- Error handling and error detection
- Different Types error such as Bit-stuff error, CRC error, ACK error, fixed-form error.
- Differential voltage concept in Controller Area Network(CAN)
-
- Controller Area Network(CAN) node interfacing levels
-
- Controller Area Network(CAN) transceivers
-
- Controller Area Network(CAN) physical layer: CAN nodes, CAN Bus voltage levels and node interfacing techniques, CAN bit timings and baud rate settings
-
- Controller Area Network(CAN) data link layer: CAN Bus arbitration, CAN Bus Fault Confinement
- Controller Area Network(CAN) & LIN protocols overview: Introduction to the Controller Area Network(CAN) & LIN protocol, Overview of Reasons for the development of Controller Area Network(CAN) & LIN, Comparison of Controller Area Network(CAN) with other serial communication protocols, Controller Area Network(CAN) vehicle network Architecture, Features of Controller Area Network(CAN) protocol, Frame formats of Controller Area Network(CAN)
- DATA frame, Remote frame, error frame and Overload frame of Controller Area Network(CAN)
- Arbitration process in Controller Area Network(CAN) communication protocol to resolve the BUS conflict
- NRZ format of Controller Area Network(CAN) protocol
- Bit-stuffing to avoid the problem cause due to NRZ format
- Error handling and error detection
- Different Types error such as Bit-stuff error, CRC error, ACK error, fixed-form error.
- Differential voltage concept in Controller Area Network(CAN)
-
- Controller Area Network(CAN) node interfacing levels
-
- Controller Area Network(CAN) transceivers
-
- Controller Area Network(CAN) physical layer: CAN nodes, CAN Bus voltage levels and node interfacing techniques, CAN bit timings and baud rate settings
-
- Controller Area Network(CAN) data link layer: CAN Bus arbitration, CAN Bus Fault Confinement
English
language
Content
Introduction
Introduction to BUSMASTER
CAN data base creation in BUSMASTER and analyzing CAN signals and messages
BUSMASTER installation
CAN Node simlation
CAN_DataBase_project
ABS CAN Node Simulation
BCM Node Simulation
Dash Board ECU Simulation